?️ INTERVIEW ?️
Zoom on the actors of the development of this innovative simulator, and how medical and technical expertise come together to build the future of surgical robotics training.


Dr. Barbara Seeliger
She is a surgeon specialized in visceral surgery. Her career is focused on minimally invasive surgery, which she discovered in 2003 in Strasbourg in the department of Professor Marescaux and at IRCAD. Through her surgical experience and her knowledge of the surgical robotics ecosystem, she brings her medical view to the project.
“For me, the future necessarily includes minimally invasive surgery because patient recovery is substantially improved. There is still a lot of progress to be made before systematically implementing robotic surgery, but there is a great future for these technologies.”

Brice Valentin
He is an engineer in information technology for health, and joined InSimo 6 years ago. As part of the ROBOTiS project, he is both project manager and developer. He discovered robotic surgery through his training and the ROBOTiS project gave him the opportunity to continue exploring this field.
“ROBOTiS responds to a real need for training surgeons on robotic system in laparoscopic surgery. Our high fidelity simulation of the thread allows for realistic manipulation and precise control of a knot formation.”

Pierre-Jean Bensoussan
Pierre-Jean is the CEO of InSimo. With ROBOTiS, he wants to enable InSimo to support the evolution of the robotics market by offering the new actors a solution to quickly train surgeons to use new robots.
“For us, it was very important not to address only the needs of a single robotics manufacturer. In recent years, we have seen the emergence of many new robotic systems, and thus there is a growing need for training surgeons to handle these new tools.”
“ROBOTiS: A generic software offer for learning robotic surgery”
If you had to describe the project in a few words?
Brice: “ROBOTiS stems from the will to offer a surgical simulation in which the technological focus has been placed on the simulation of sutures. Competing simulators are still limited on this aspect, which is why we focused on this niche, in order to offer a solution as realistic as possible.”
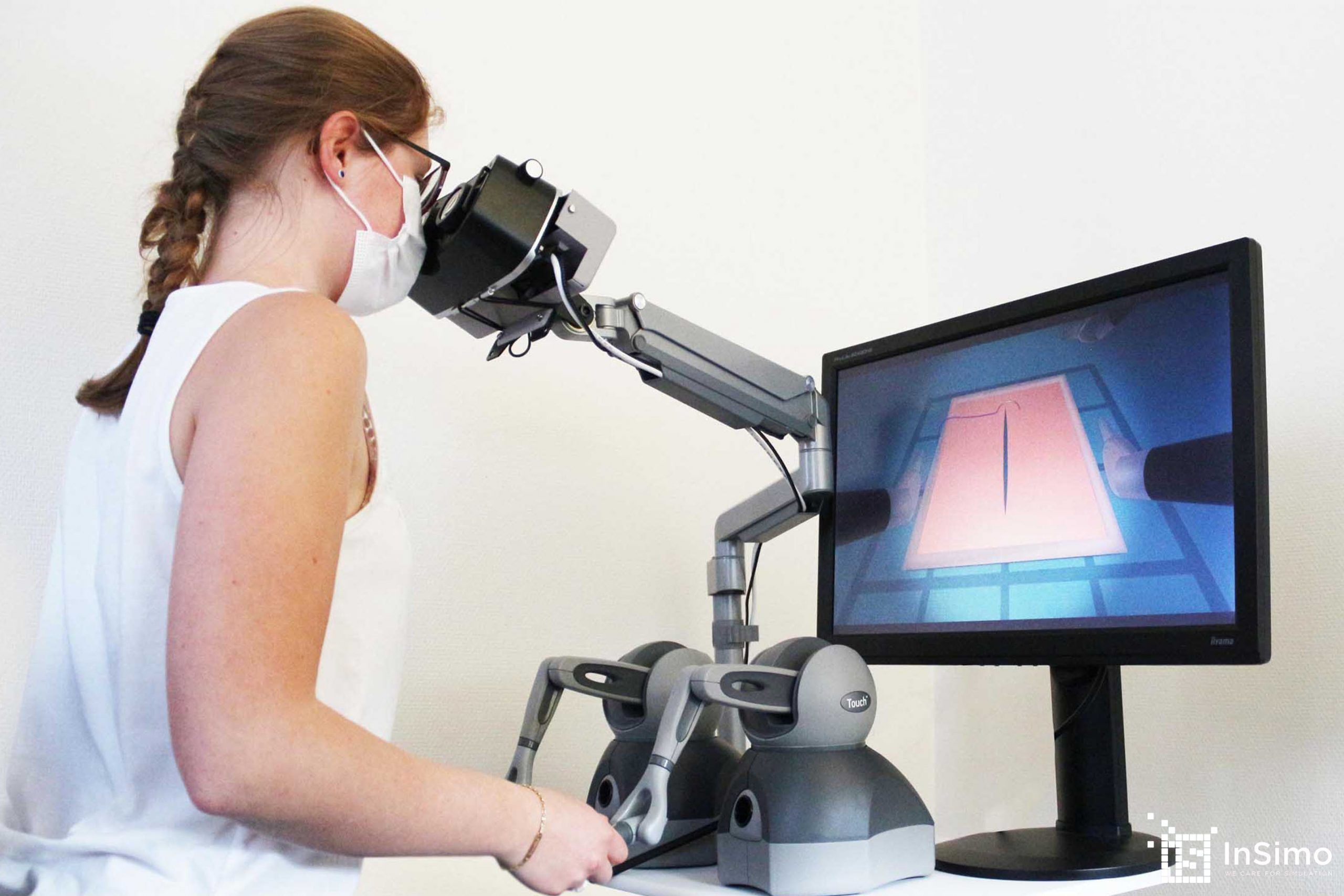
High fidelity simulation of the thread in ROBOTiS
(triple knot tying)
In 2018, InSimo was the winner of an european call for projects in partnership with the Swedish company SenseGraphics (acquired during the project by Surgical Science) for the DISSEcT project. The aim was to address the needs of Intuitive Surgical, historical actor in the surgical robotics market, and manufacturer of the Da Vinci robot, through a generic simulation software offer for robotic surgery training.
Over the course of the project, the strategic issues have evolved and the team has decided to refocus on clear educational objectives, and in particular on a realistic simulation of the suture, a major lack in the current simulation offer. This is how the ROBOTiS project was born.
“Educational objectives focused on the fundamentals of surgical robotics”
What is the ambition of ROBOTiS?
Pierre-Jean: “We want to offer a generic offer in order to be able to collaborate with manufacturers who are entering the market. This is why our ROBOTiS simulator integrates the standards of the instruments of the discipline and offers educational objectives focused on the fundamentals of robotic surgery. Our objective: to make possible the integration of our technology so that any industrialist/robot can project themselves into the use of this technology.”
Barbara: “Later, the ambition will be to integrate surgical scenarios by moving from basic exercises to more complex ones. Users will have to perform sutures during surgical procedures within their anatomical context, such as bowel anastomoses, which obviously requires additional technological bricks than the suture alone.”
Pierre-Jean: “In the robotics sector, there are many possible fields of application for simulation, beyond pure training. We imagine a future where simulation will be able to help in the planning of certain surgeries, and one day perhaps in the automatic piloting of the robots assisted by the operative planning. There are even applications in the design of these robots. Plenty of fields related to training bring innovation in simulation around robotic surgery. There is a significant potential for development.”
“Dynamics and inextensibility of the thread: two decisive criteria”
Why focus on suturing? What technical challenge does this represent?
Barbara : “In general, simulators haven’t incorporated realistic sutures yet. Whether it is for the passage of the thread through tissues, or for the tying of knots, the compromises are very often not very realistic and do not represent in detail a gesture which is nevertheless essential in any surgery. So we set a target applicable to any type of surgery, in order to apply it in robotic surgery.”
High fidelity simulation of the thread in ROBOTiS
(continuous suturing)
Brice : “Technically, the problem with realism comes mainly from the inextensible aspect of the thread. The threads generally had an elastic behavior, as this is easier to simulate, but this is not the required level of realism.”
Pierre-Jean : “Add to that the inertia. In many simulators, there is a floating effect which makes the thread appear to be slightly moving. This facilitates the simulation by avoiding collisions, but it creates an environment that lacks fluidity. The two decisive criteria on this project are therefore dynamics and inextensibility.”
Brice : “Another technical challenge is the knot gesture. One the gesture is made, it is usually an animation that takes over. Therefore, the knot is frozen, which doesn’t allow any more interactions and therefore no possibility of readjusting or sliding, which is something very important.”

Comparisons were made between simulated thread and real thread. The team observed the size, behavior and shape of the thread in certain positions, or the effects of gravity, and then adapted the simulated model to best represent reality.
Barbara : “The aim was to represent the real behavior of the thread. Tying a surgical knot can be quite simple as long as the thread in the simulator faithfully reproduces the reality of the motion. On the contrary, it is very difficult to teach the correct move if the thread is not behaving realistically.”
“Practice to learn”
How did InSimo come to collaborate with Barbara?
At the beginning of the ROBOTiS project, the challenge was to establish close collaboration with an SME (Subject Matter Expert) in order to ensure that the real needs of the field were met.
Brice : “For us it was a real deficit, because we implemented things without really knowing their pedagogical usefulness, or if it was realistic. (…) I immediately thought of Barbara because we knew each other from IRCAD, and so in early 2020, the collaboration was born.”
Pierre-Jean : “Back then, we did not yet have a functional suture simulation, and we couldn’t even properly catch the thread. The project did not allow an interactive demonstrator to be presented on these features. So we started working with Barbara to identify ideas for educational scenarios that we wanted to integrate into the simulator”.
For you Barbara, why is a project like ROBOTiS important?
Barbara : “What was particularly interesting was to start by defining what was important and relevant to bring to the surgical world and to education, based on our experience at a surgical training center. The idea of offering an alternative to existing simulators by developing a solution capable of overcoming the current limitations immediately appealed to me.”
“Suturing is really a technical skill. Thus, ex vivo or in vivo models are still essential to progressively move towards humans. You cannot understand the gesture by watching videos, you have to practice to learn, to tie hundreds of knots to acquire an automatism. This is where a robotic surgery simulator reduces the practice time required on the real machine, and its use avoids the costs of making the robotic system available for this training. “
Why is it important to involve a medical expert for such a project?
Throughout the project, interactions between the technical team and Barbara are manifold, in order to translate the surgical and technical needs, and to understand how to transcribe them in the simulation.
Brice : “There is a very important part of communication to go in the right direction from the start and avoid having unnecessary development. We must focus our development on having the best educational value since that is what matters most in simulation. It is experts like Barbara who will eventually use the simulator for teaching. The final user must be at the heart of the development from the start and it is essential not to wait until the end of the project to have it tested, in order to make continuous integration.”
Barbara: “We can really see the difference in the realism of the simulator between the start of the project, the intermediate and the current status, which shows the importance of having a surgical expert involved and developing the project in connection with the users. It is very important to remember that it is the surgical teams or future surgical teams that we serve. Projects that put this dimension aside will not succeed. InSimo has the technical knowledge to build the simulator, and I know the needs of the target audience that InSimo seeks to identify. The challenge is to provide a product that our audience will appreciate and this can only happen through interdisciplinary collaboration. ”
“The more we highlight the problems, the more we identify the needs.”
What lessons do you learn from this collaboration?
Brice : ”At the beginning, there is an adaptation phase. Medical terms really need to be translated as some terms may seem normal to surgeons. With Barbara we are lucky to have an expert who is used to training people and therefore has a great pedagogy. She also taught us to tie knots, especially from a distance, in a telementoring approach, because of the pandemic situation.
There is also a notion of intellectual honesty that we have on both sides. Barbara could be very critical, she never did anything just to please us. It was very important to challenge ourselves on the project in order to bring the level of realism much further.”
Pierre-Jean : “For the lessons: hire a medical expert from the start to focus the team on the real educational value. And avoid engaging in continuous improvement of technology unrelated to final users, but preferably go towards an MVP approach (minimum viable product) which consists of very quickly bringing out a demonstrator, even if it is not perfect, and putting it directly in the hands of a surgeon. It allows you to see how the user will react and it provides a lot of information. We didn’t have this approach from the start because we didn’t have an SME.“
Barbara : “The more we highlight the issues, and the more we identify the needs, the more relevant the result will be. It’s important to interact frequently and stay focused on the goals.”
“A triple knot in live demo!”
Do you remember a key moment of the project?
Pierre-Jean : “One of the moments that stood out for me was when I saw Barbara tie a triple knot during a live demo! I honestly thought there were some unattainable steps in terms of simulation. I’ve been working on suturing research projects for years (…) I know it’s a very complex subject. Seeing a surgeon manipulate the simulator and chain several knots in a row is impressive ”

Barbara, for her part, considers that the culmination of the project was the demo performed live in March 2021 in front of the members of Surgical Science, historical partner of the DISSEcT project.
Barbara : “We felt comfortable because we knew we were presenting something good. We were all very excited to present this result live. We trusted the stability of the solution, which allowed us to make gestures on demand, it was great.”
“A new collaboration with the Institute of Image Guided Surgery”
What is the next step for ROBOTiS?
Brice : “We considered doing a study to try and train people with a specific simulation exercise and see if they learn faster than with a standard approach.”
Barbara : “There is also another more immediate study that is being carried out to identify the educational contribution of visual indications on the thread. For example, we show the tension that we apply to a thread before breaking it and this should already allow you to learn to handle it properly.”
Brice : “We will also be able to participate again in conferences such as SoFraSimS or others and collect feedback in the field with the demonstrator.”
Pierre-Jean : “We must relaunch our industrial collaborations or create new ones to finalize and improve our product. Finally, Brice is currently leading a new project in InSimo, called Ensist. It marks a new collaboration with the IHU, in the continuity of ROBOTiS, in the field of endoscopic surgery. The suture module developed in ROBOTiS will be reused and adapted to this new project.”
FOLLOW US